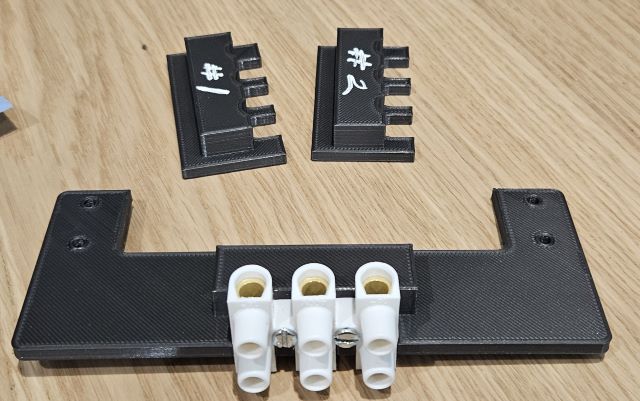
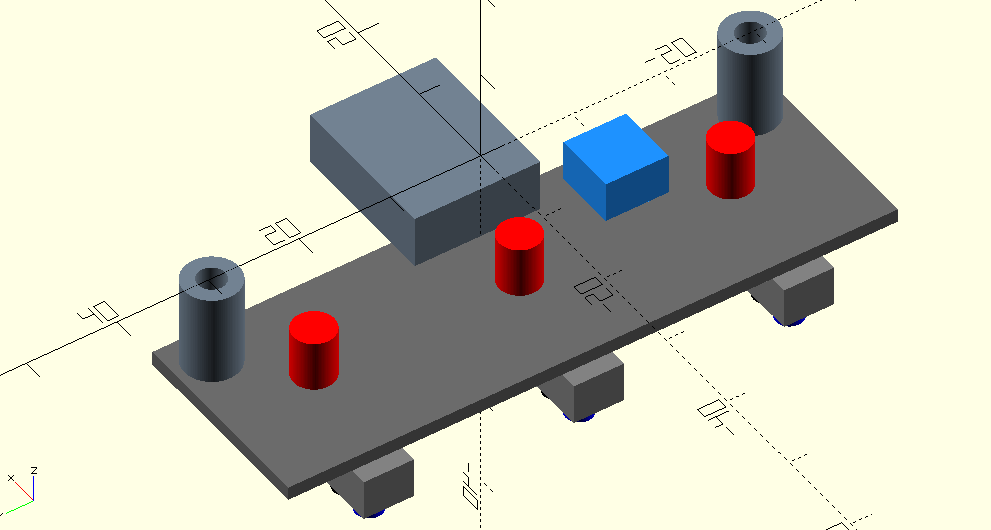
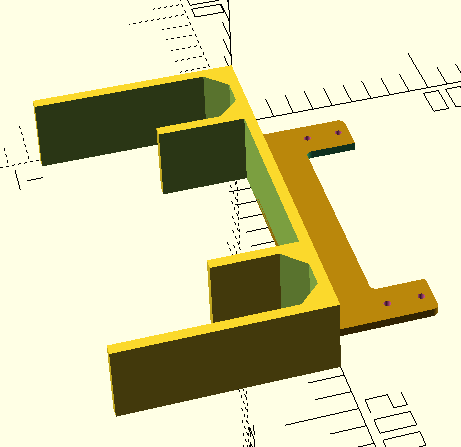
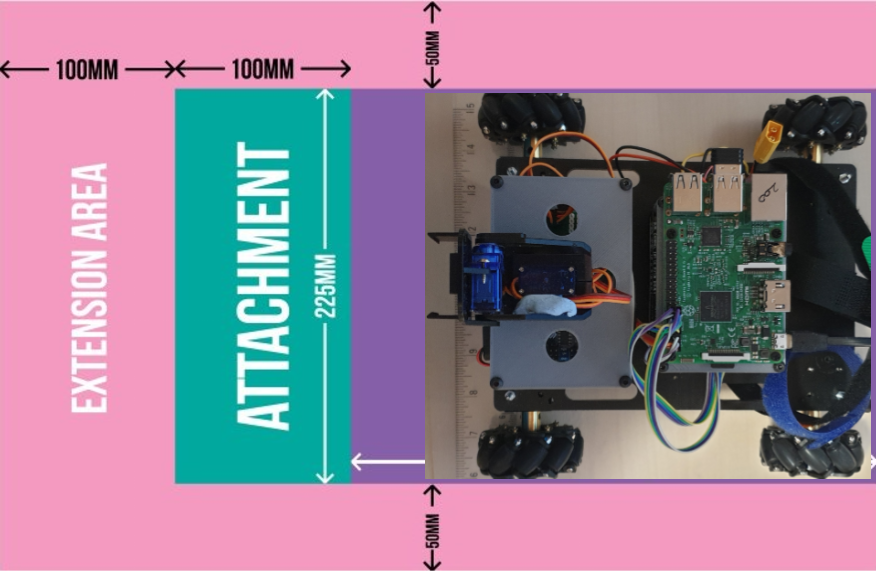
The goal of this was to securely mount the electrical chocolate bloc provided by the competition organisers to the robot. The challenge was to do
We need to mount the line follower on the base on the robot in the centre. After some quick research I found that, for it

Was it a silly idea at the last minute to add an Pi Cam to capture FPV videos of each of the challenges? Short answer
With time short and the unheard of concept of KISS [Keep It Simple Stupid]. Seriously what’s the point of being an engineer if you cant
One of the challenges that up until this point we weren’t able to complete is Hungry Cattle. Its time to put that right! I started
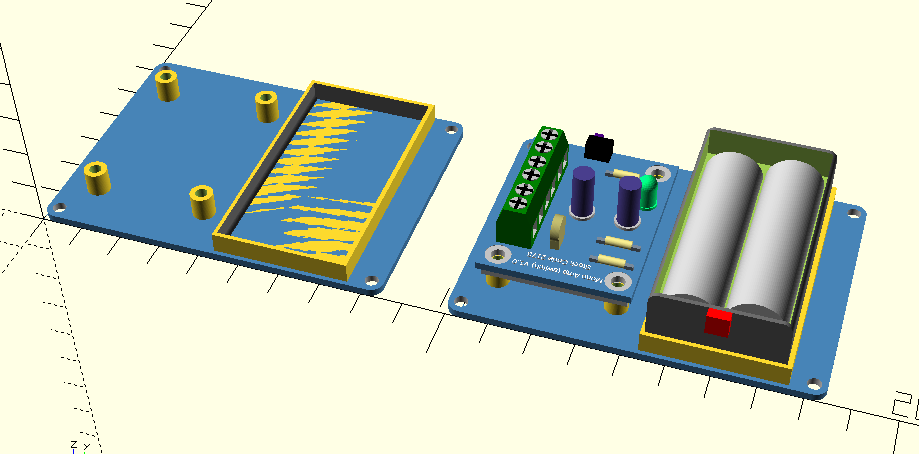
In order to have the robot issue rousing Lemming quotes while we perform the challenges we needed an amp and speaker for the Pi. We
Last Weekend, we made an amplifier, so we can add lemming sound effects. You might be thinking that adding Lemming Sound Effects IS NOT the
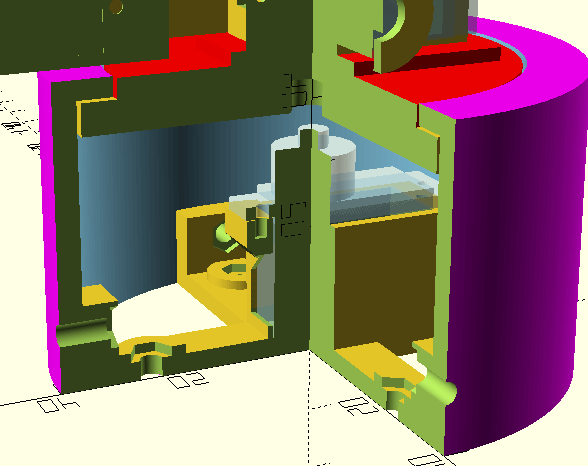
While testing the robot arm, the movement is fast enough that it highlighted an issue with the panning servo. After a few movements it was
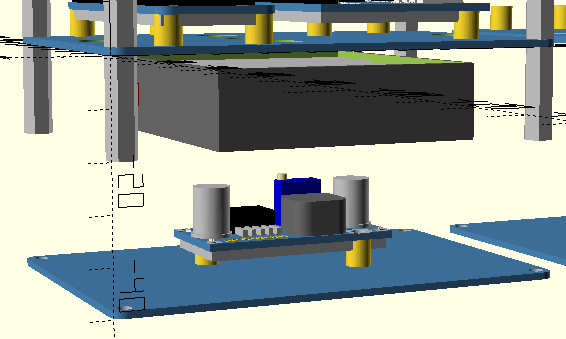
The servos have up until this point been powered by a separate 4xAA battery pack. This adds weight and another set of batteries to replace.
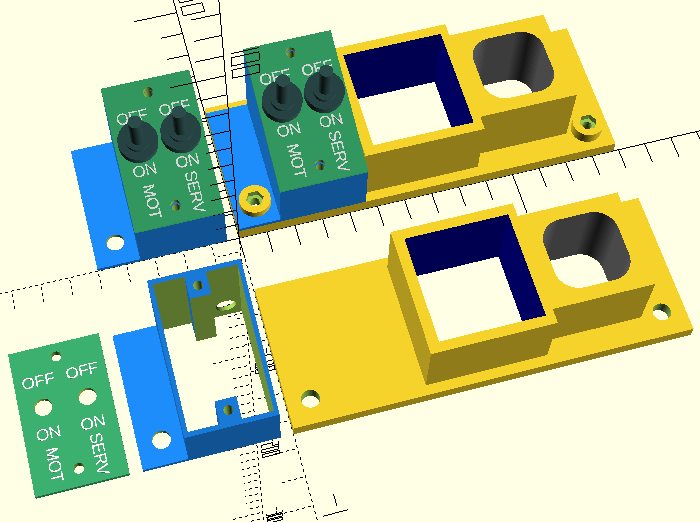
While testing the robot it would make more sense to be able to power on or off the motors and servos. With space on the
Where are we? So far, we have completed our test robot. This enables us to change where we want components on our final robot -to

With a completed robot arm this job was to add it to the robot and integrate with the PCA9685 servo board. Some code using the
The code was updated to allow driving via the analogue sticks on the remote control. The left one drives forwards, backwards, left and right while
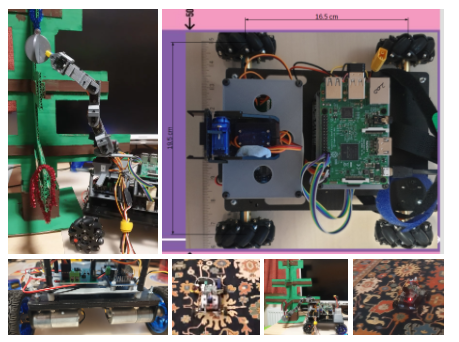
Prior to building/3d printing the proper robot we are using a base made a few years ago. This is handy as it allows us to

Putting everything together and trying out driving a mecanum wheeled robot was a lot of fun, but its still a bit too Heath Robbinson’d with
View More