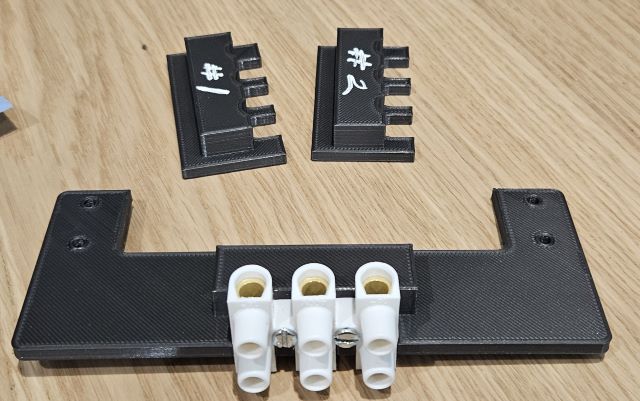
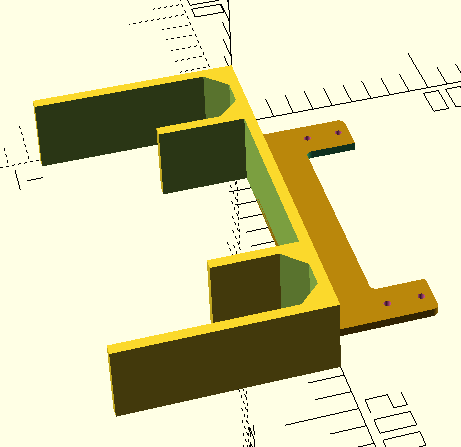
The goal of this was to securely mount the electrical chocolate bloc provided by the competition organisers to the robot. The challenge was to do

Was it a silly idea at the last minute to add an Pi Cam to capture FPV videos of each of the challenges? Short answer
With time short and the unheard of concept of KISS [Keep It Simple Stupid]. Seriously what’s the point of being an engineer if you cant
As a completely frivolous addition to the robot we wanted it to “talk”. By talk we mean issue Lemming sound effects! Previous jobs involved adding
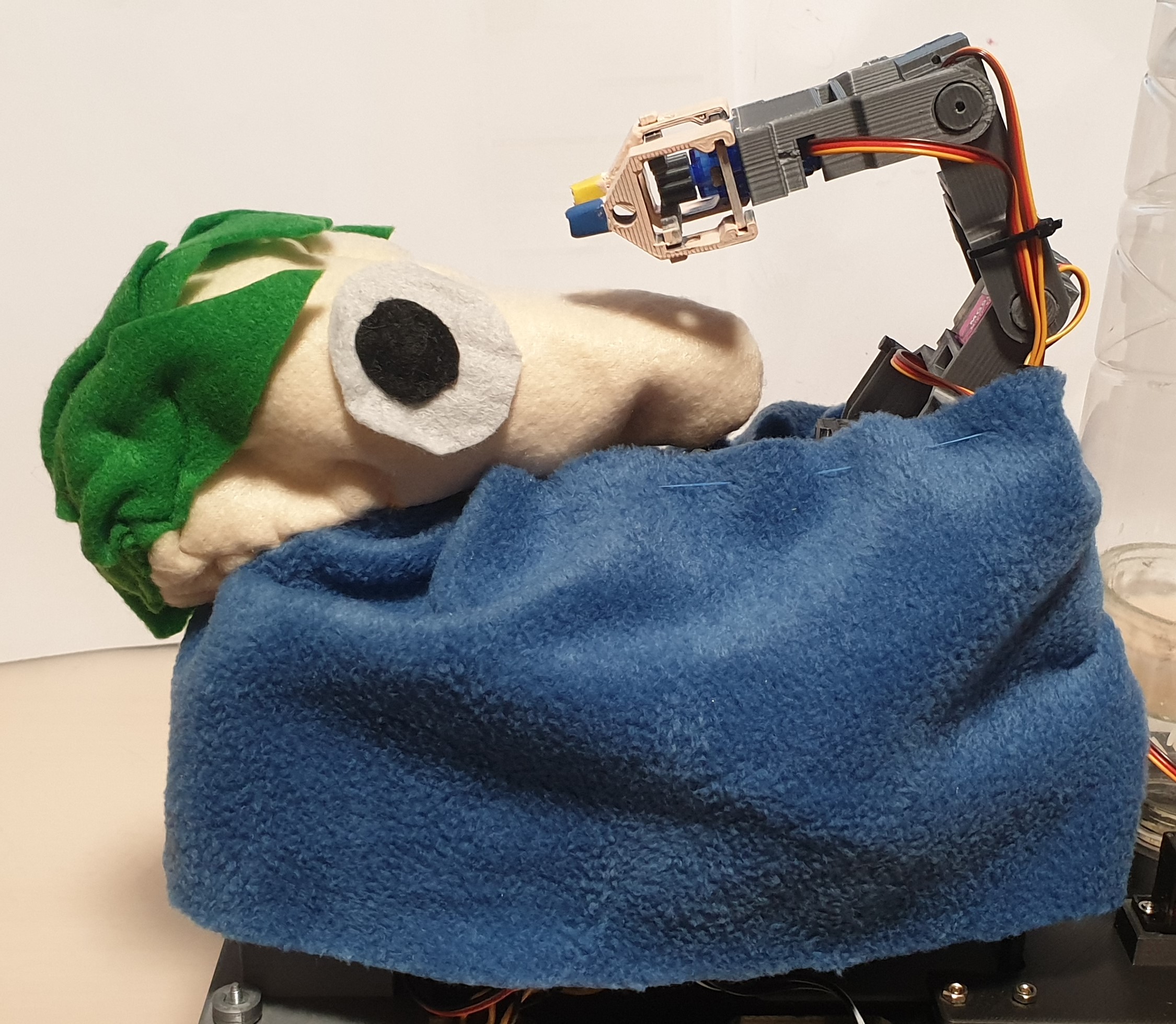
Its a Lemming, so needed a head to go along with the arm. The game from the early 90’s on the Amiga and the associated
One of the challenges that up until this point we weren’t able to complete is Hungry Cattle. Its time to put that right! I started
In order to have the robot issue rousing Lemming quotes while we perform the challenges we needed an amp and speaker for the Pi. We

With the wooden part of the arena built (minus the walls), it still doesn’t look like a proper arena. Each of the squares in the

We are at a point where models now exist for all the challenge objects. These are uploaded in their own page here. Three versions of
Following some pretty extensive work on the rotator ring for the robot arm, the power switches and powering the servos from a DC-DC converter connected
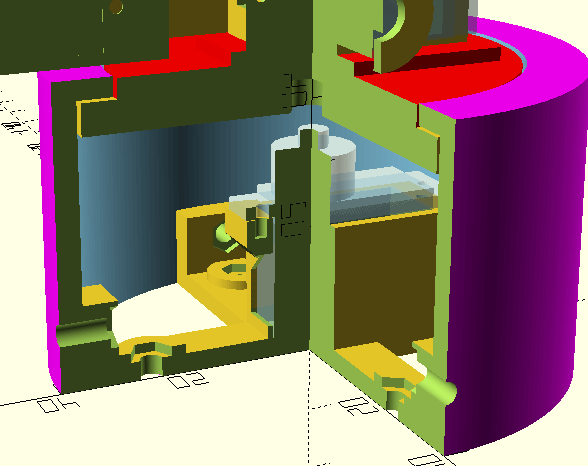
While testing the robot arm, the movement is fast enough that it highlighted an issue with the panning servo. After a few movements it was
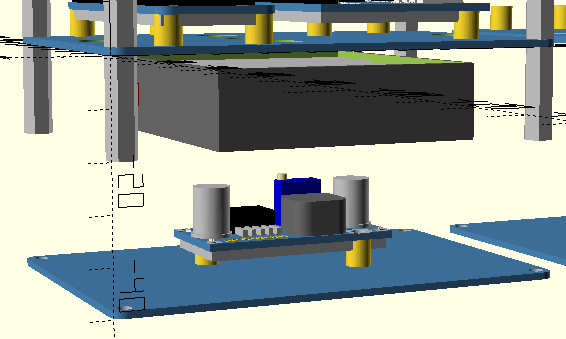
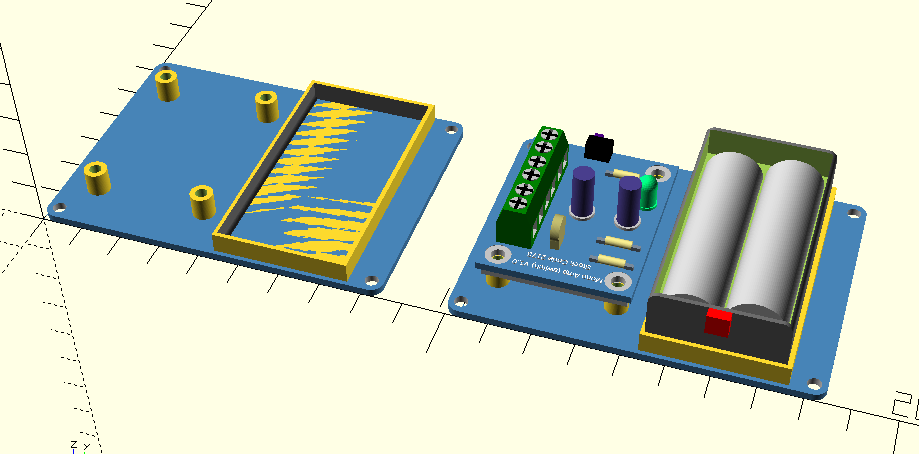
The servos have up until this point been powered by a separate 4xAA battery pack. This adds weight and another set of batteries to replace.
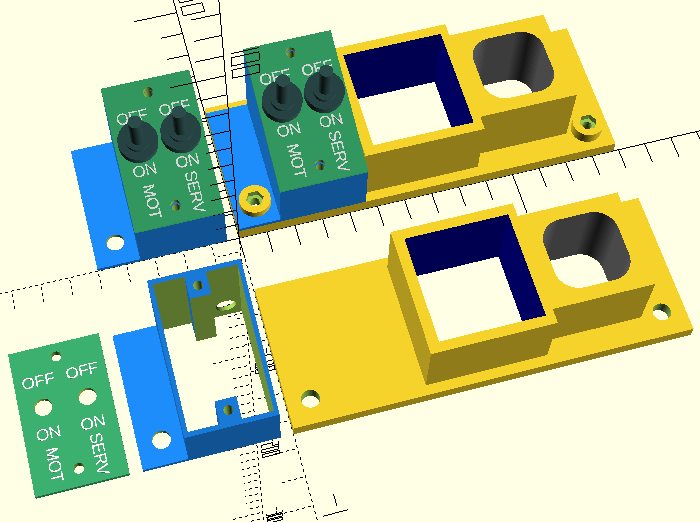
While testing the robot it would make more sense to be able to power on or off the motors and servos. With space on the

With a completed robot arm this job was to add it to the robot and integrate with the PCA9685 servo board. Some code using the
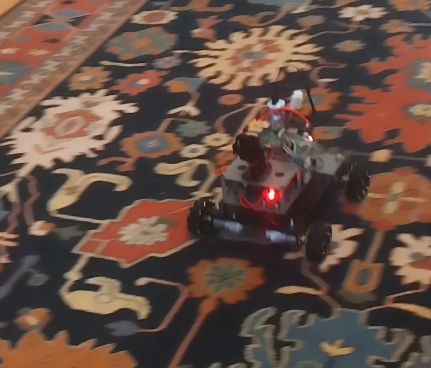
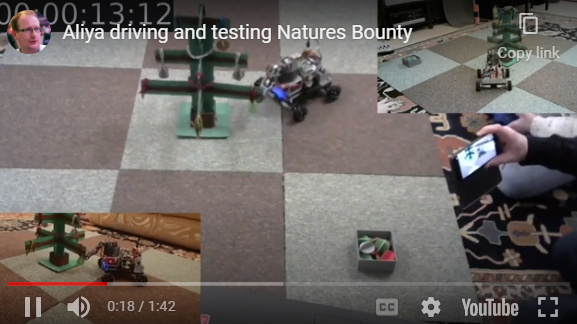
The code was updated to allow driving via the analogue sticks on the remote control. The left one drives forwards, backwards, left and right while
View More