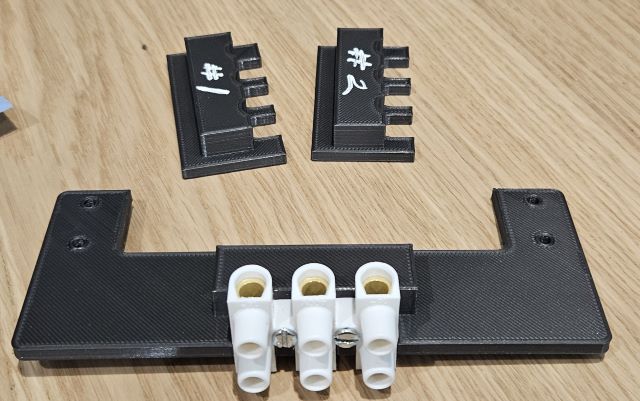
Shepherd’s Pi Attachment
With time short and the unheard of concept of KISS [Keep It Simple Stupid]. Seriously what’s the point of being an engineer if you cant keep making things hard? Anyway we opted for more of a pusher system that could cater for side or front on sheep.
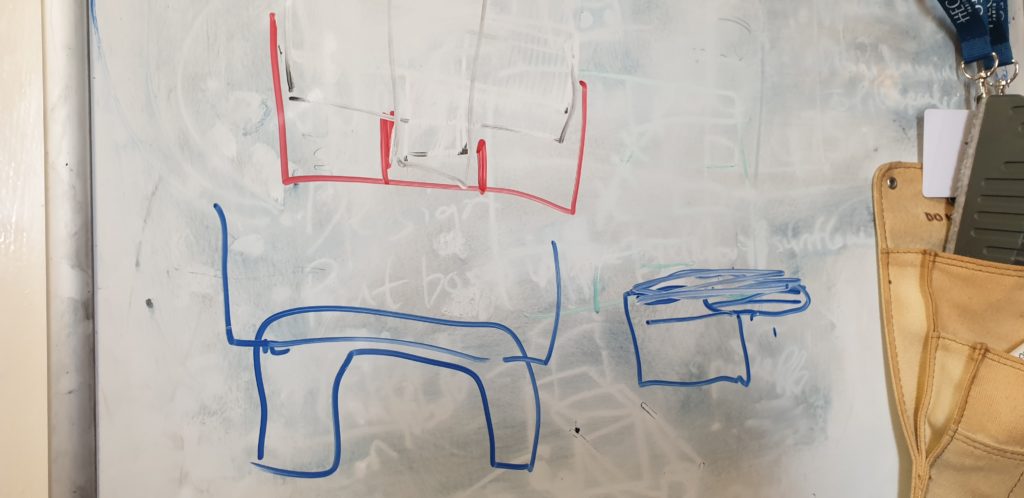
Like most things it started with a session on the whiteboard to look at ideas.
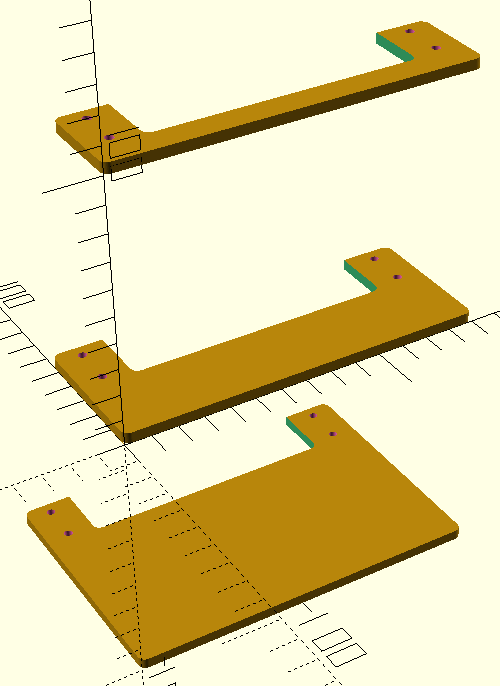
We decided that this would work really well as an adaption of the generic attachment created a while back. It simply needed making shorter.
Measurements were made of the sheep with a bit of tolerance added so the control would be easier.
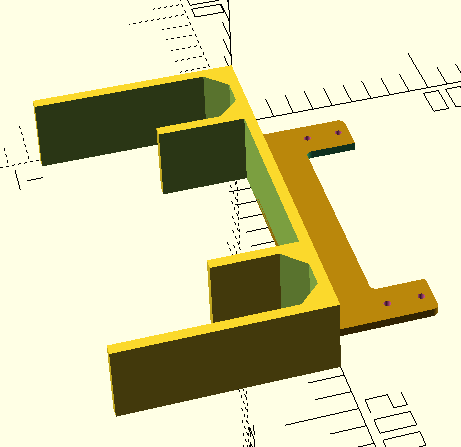
Some strengthening triangles were added to the arms as well to give a little more potential strength as the robot can apply a fair amount of torque.

Adding the attachment to the built up model, shows it should fit well. Once printed this matches the real robot perfectly.