Changing the power supply to the servos
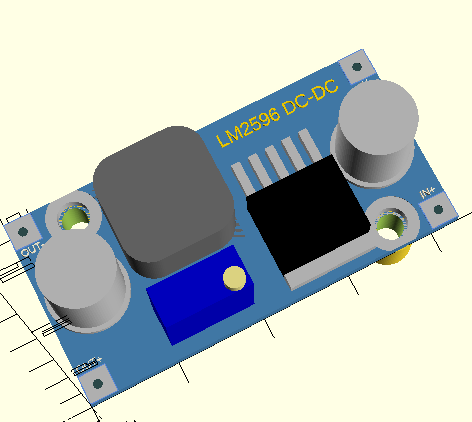
The servos have up until this point been powered by a separate 4xAA battery pack. This adds weight and another set of batteries to replace. An improvement is to use an LM2596 DC-DC step-down buck converter and use the main 14.8V LIPO that is powering the motors stepped down to 5.9V. The LM2596 can provide 3A which is plenty sufficient for the servos used in the robot arm.
The first step was to model the LM2596 board in OpenSCAD and get it to produce mounting posts.
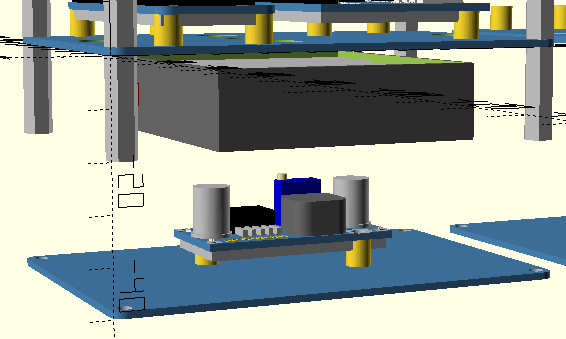
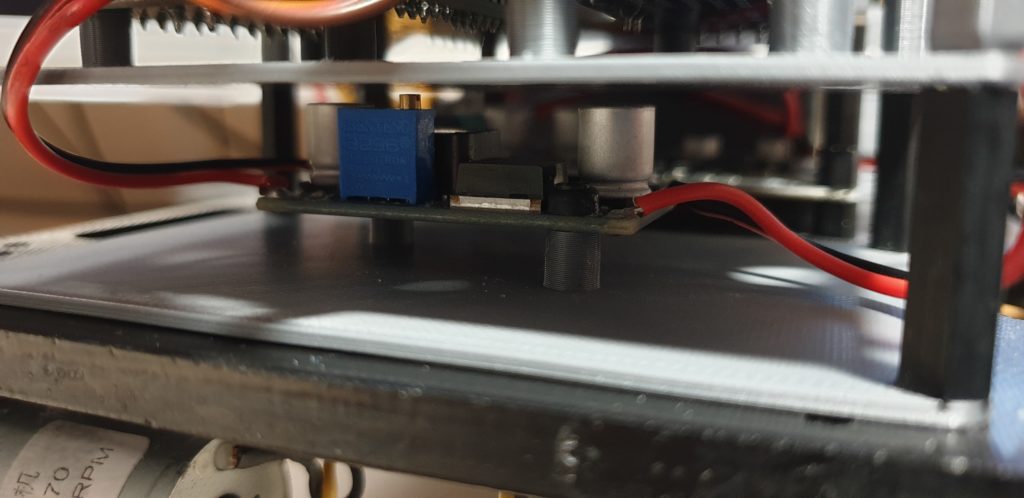
The aim is the mount this under the servo boards and replace the 4xAA battery pack. An existing bare board was used and the LM2596 board added to the centre.
20mm mounting posts were used as spacers between the LM2596 board and the servo board above. The input the LM2596 was taken from the main LIPO and run through the Power Switches so they can be turned off and on.