Motor Wiring Loom
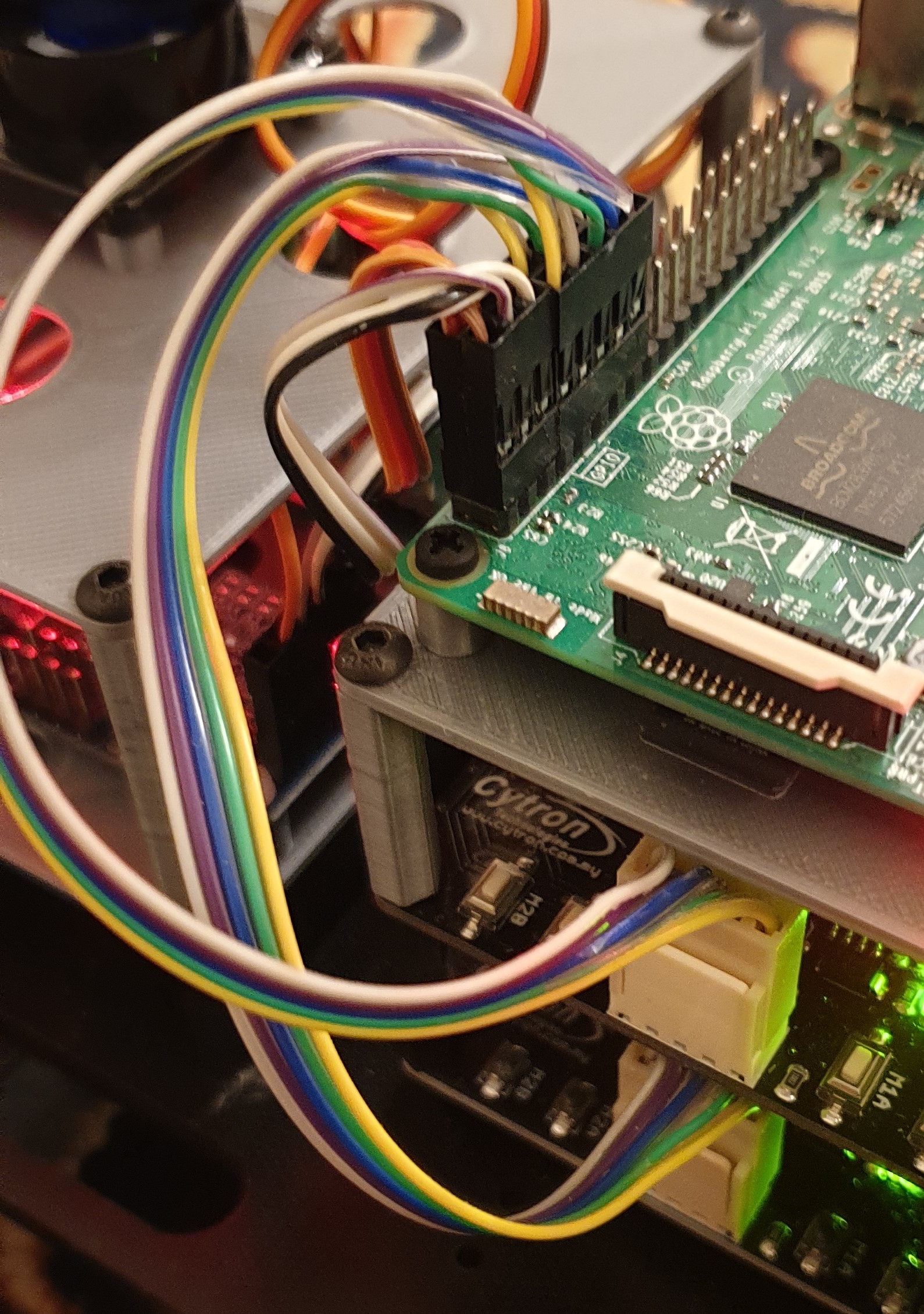
The two motor controllers contain five connections in each. They also come with a 5 pin jst connector on each board. This job was to make a connector for the pi that split into each of the two controller jst’s.
I made the cables reasonable long as I wanted to make sure it would fit on the proper robot when we get around to building it.
Colour wise the cables are:
Yellow: Left Motor Direction
Green: Left Motor PWM
Blue: Right Motor Direction
Purple: Right Motor PWM
Grey: GND
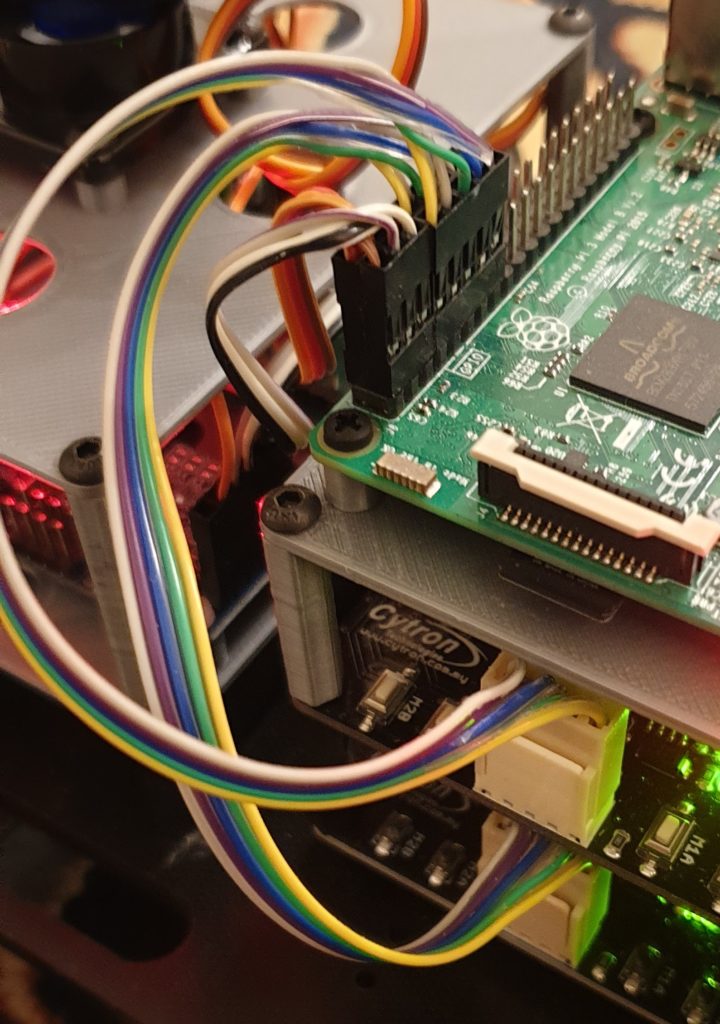
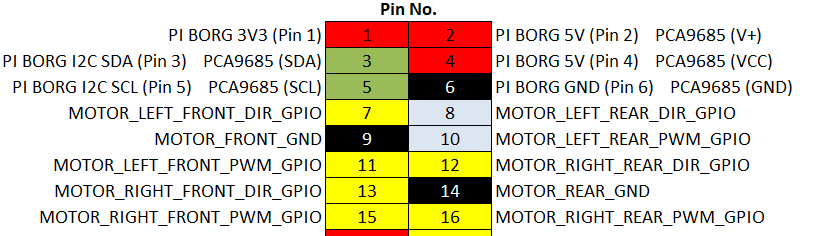
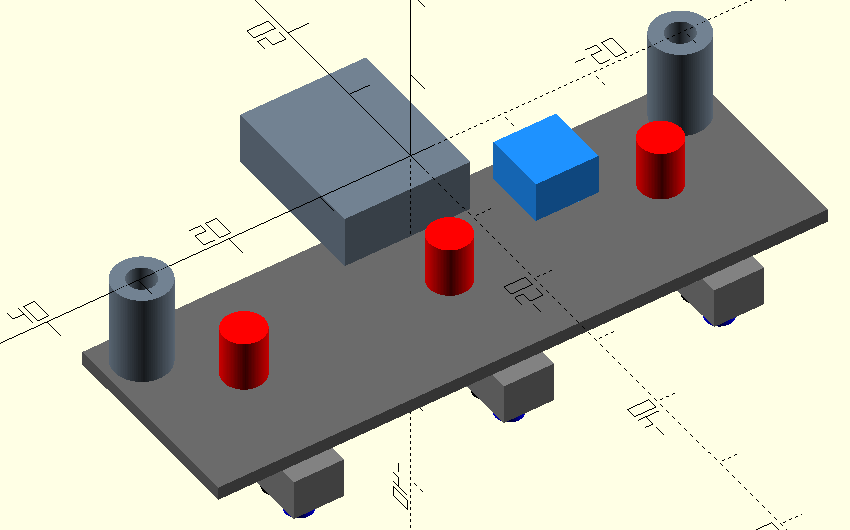
I chose the pins to be within the same 2×5 block. It also utilised the two grounds, one for each controller to save two cables in a single pin.
Please follow and like us: