Mounting a Pi Zero and Motor Controllers
Prior to building the actual robot we need to be able to test the components we are going to use on an old chassis. This will provide insights prior to completing and printing the robot design. I’m sure we will have to print it a few times, but getting it right the 3rd time will be better than the 8th.
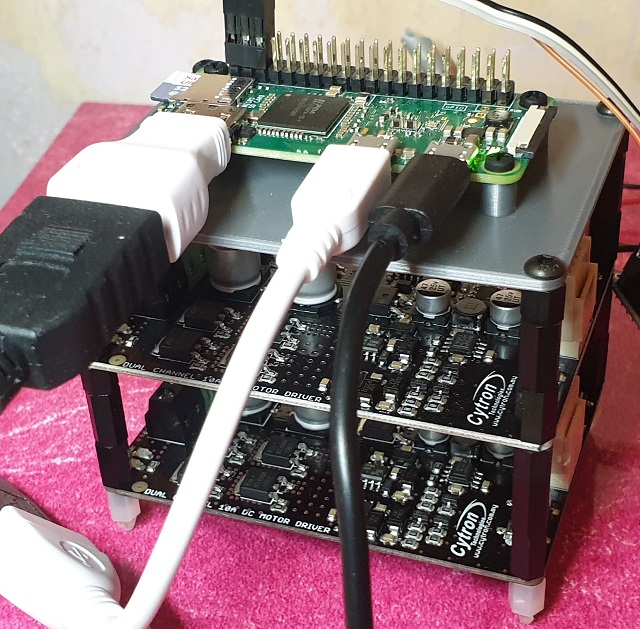
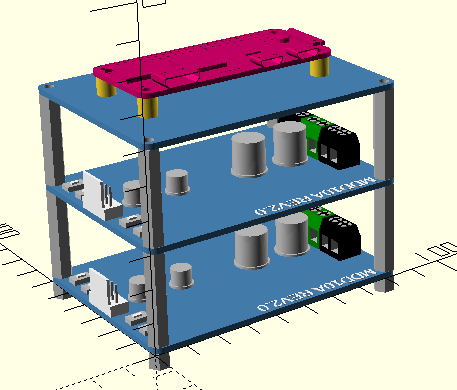
The easiest way is the stack the boards. In this stack we are going to have both of the motor controllers. These will provide four channels which (if we decide to) will enable us to use Mecanium wheels.
Using the MDD10A OpenSCAD file previously created and taking just the bare board and screw holes was a good start.
A Pi Zero (which I’m using for testing) screw mounting posts was added to the bare board.
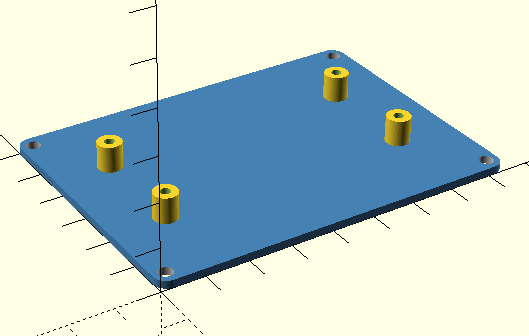
This looks ok in the model
..and other than putting the motor controllers the other way around tuned out exactly as I’d hoped.