Servo and Ultrasonic Boards Stack
Prior to building the actual robot we need to be able to test the components we are going to use on an old chassis. This will provide insights prior to completing and printing the robot design. I’m sure we will have to print it a few times, but getting it right the 3rd time will be better than the 8th.
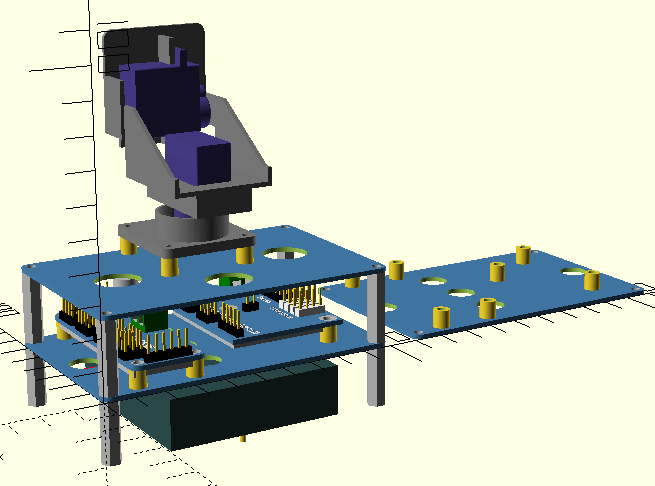
This is the second stack of components on the test robot. It contains the pan and tilt mechanism, the ultraborg board (for servo’s and ultrasonics) and the PCA9685 16 Channel 12 Bit PWM Servo Driver. Finally the battery pack to power the servos should fit below that stack.
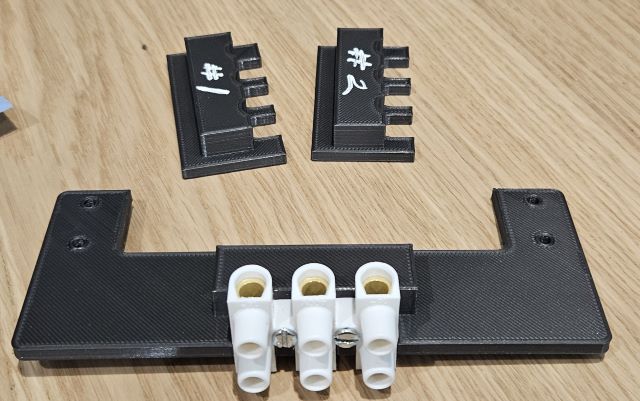
The stack was also designed to use the mounting holes used by the motor brackets.
The image doesn’t currently use long enough standoffs to place a battery pack underneath.
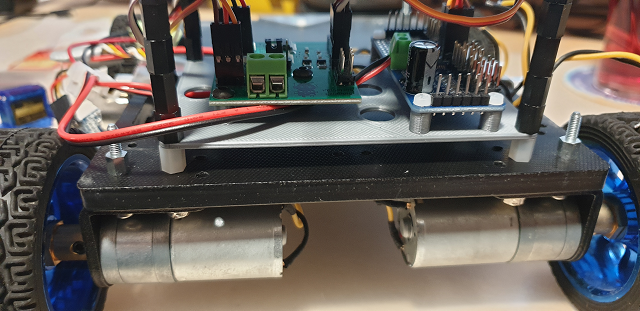
This is a full stack built up.